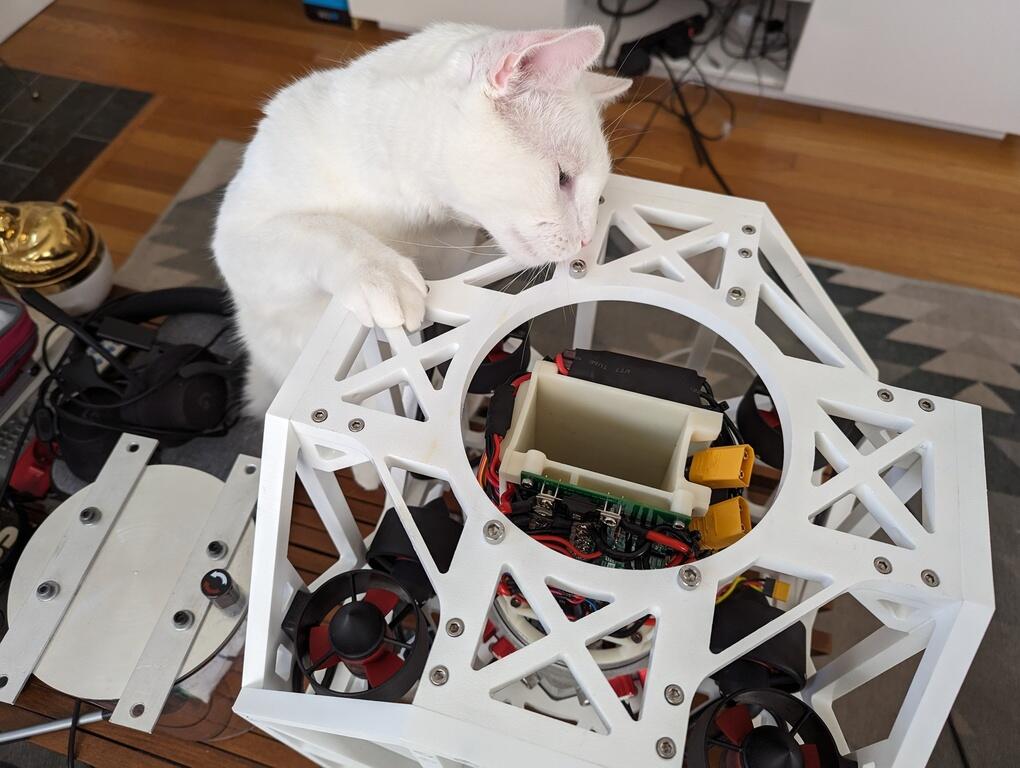
Millennial Falcon#
The MF is an unmanned underwater vehicle (UUV) built originally for the 2023 National Underwater Robotics Challenge (NURC) but suited for untethered autonomous operation as well. There were a few factors driving the design:
- Relatively low-cost (out of pocket, after all)
- Platform for learning ROS2
- Provide examples for FRC 1540 students: general UUV construction, custom PCB applications, wiring strategies, etc.
SPECS#
Power#
- 2x on-board 4s (14.8v) 5000mAh LiPo Turnigy batteries in parallel
- 80A fuse per battery
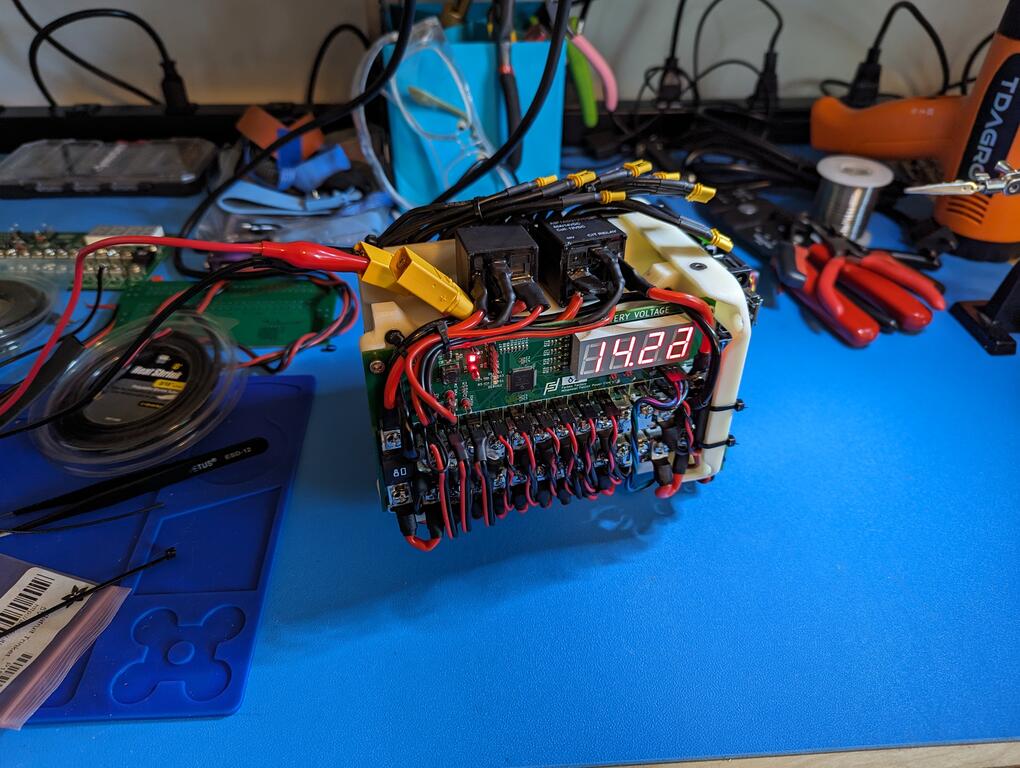
- Kill switch physically disconnects batteries via two 80A automotive relays
- Custom "Power Core" PCB
- 12 channel power bus
- Supply voltage indicator
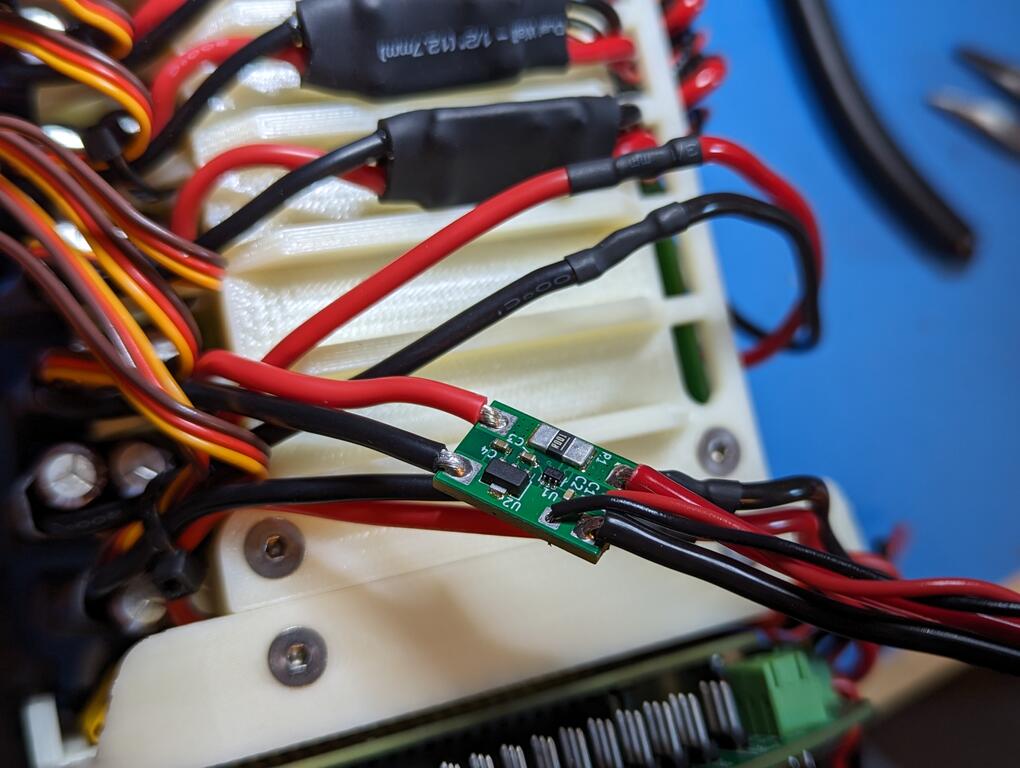
- Individual channel current measurement via inline low-side current sensing
- Mission switch input
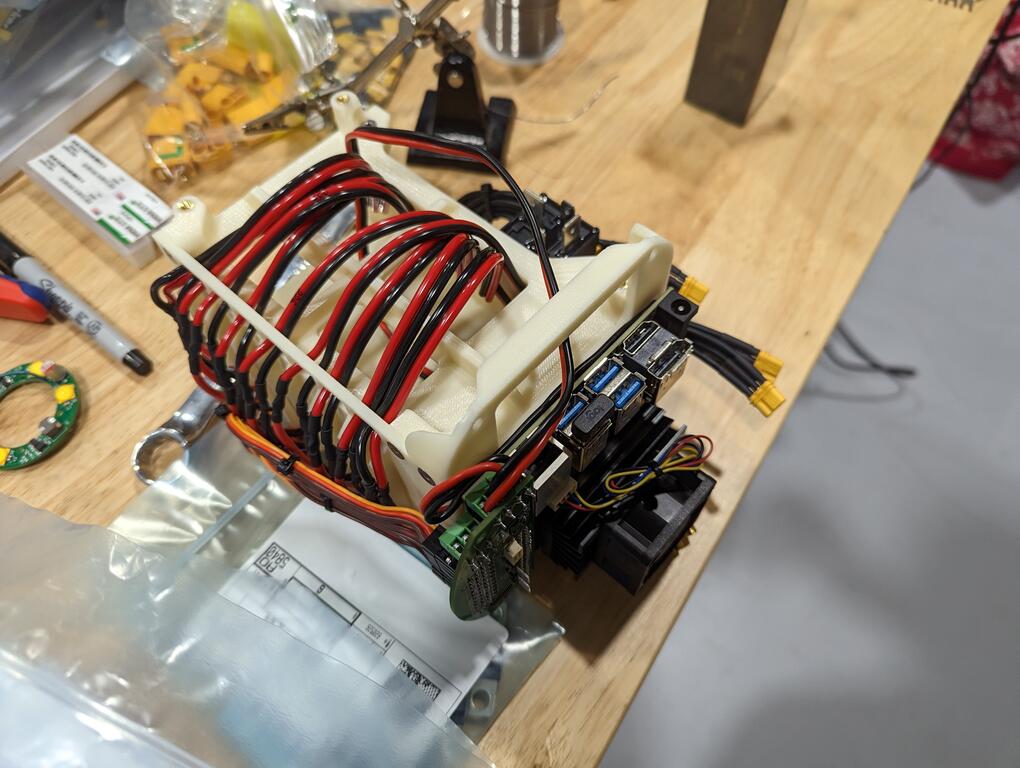
Computer/Sensing#
- Jetson Nano Development Kit
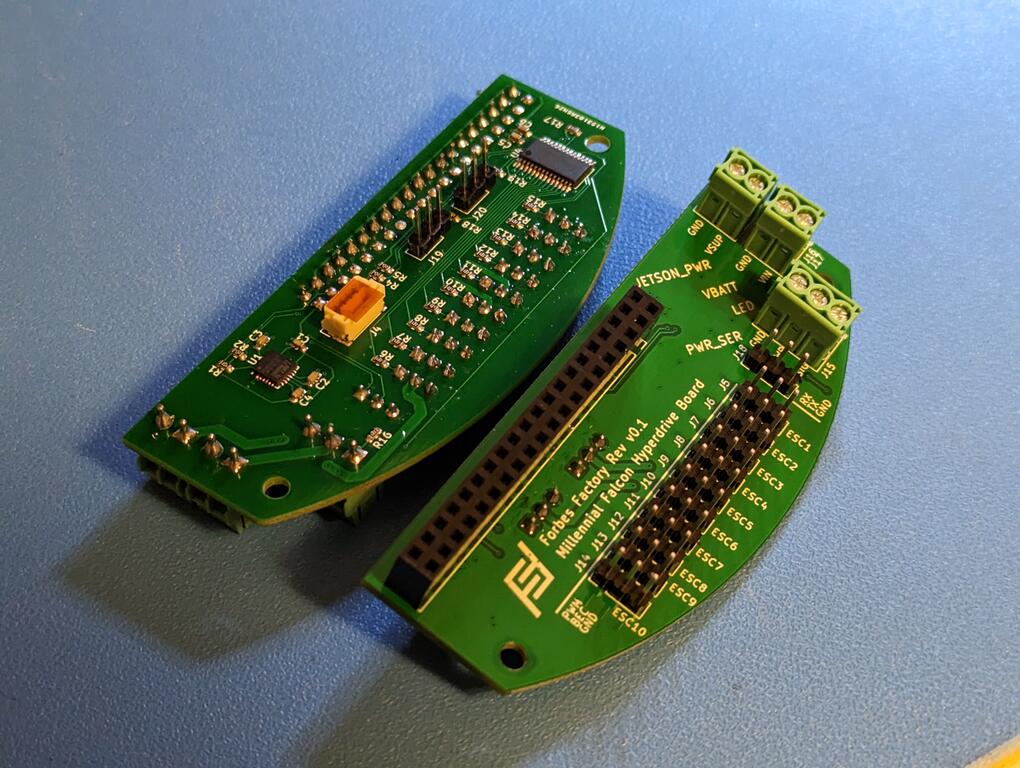
- Custom "Hyperdrive" PCB
- MPU6050 IMU
- Blue Robotics 10m Depth Sensor
- PCA9685 PWM expansion
- Arducam wide-angle IMX219 board camera, up to 720p@120fps or 1080p@60fps
Actuation#
- Full 6 DoF control
- 7x Hawk Hobby 16v 300W thrusters
- 4x vertical
- 3x horizontal
- Generic 40A ESC
- 2-axis servoed camera gimbal: 30deg roll, 45deg pitch
- Custom 2000 lumen LED lighting ring using 4x Cree XHP70
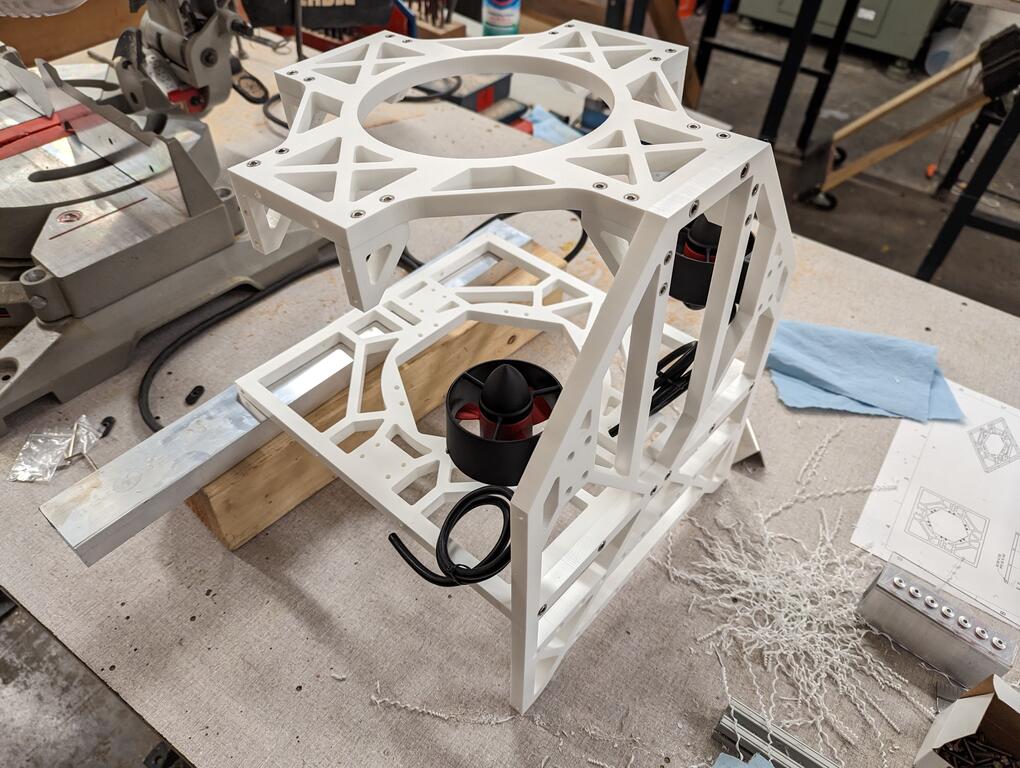
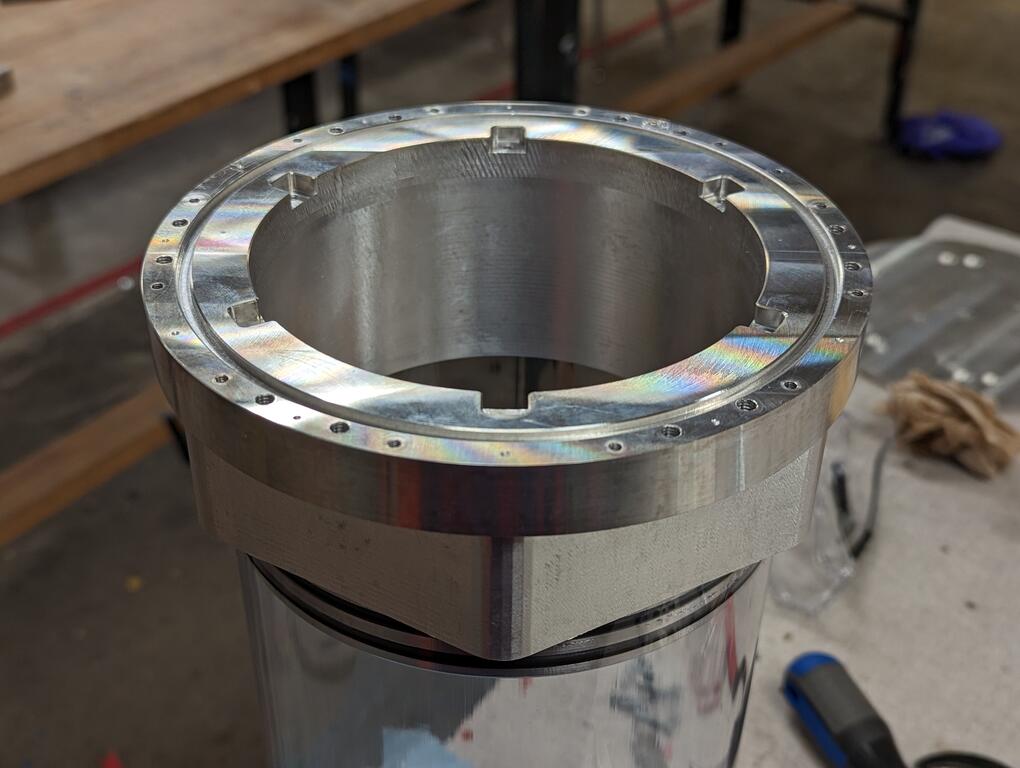
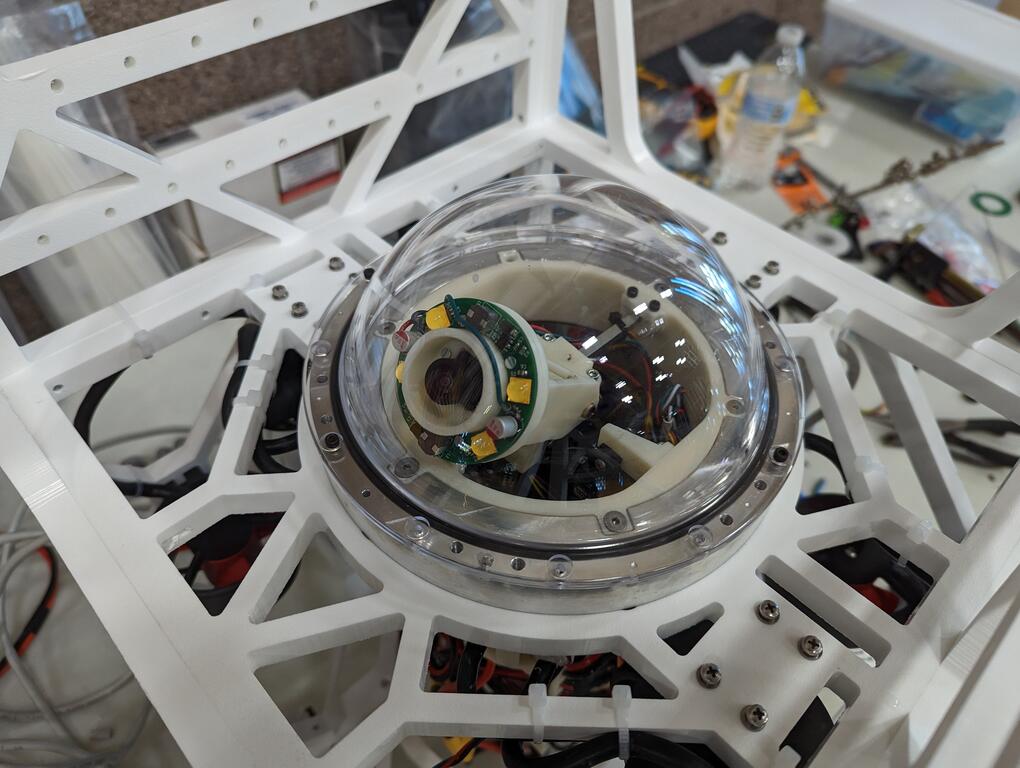
Structure#
- 1/2" Starboard (HDPE) frame
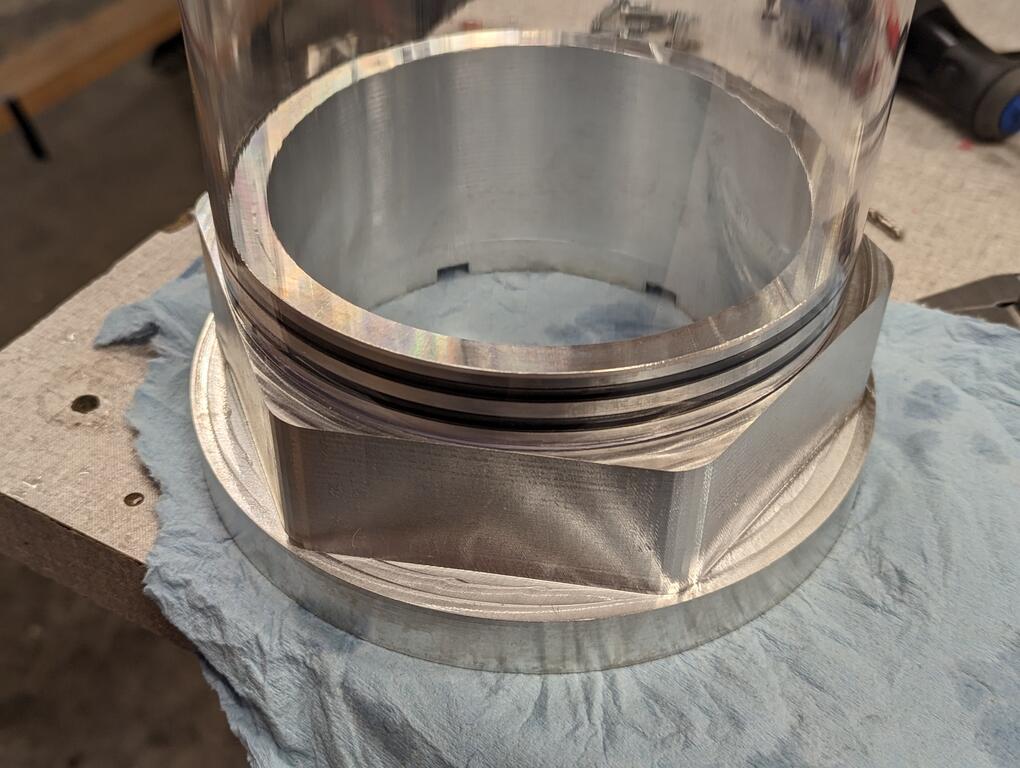
- 6" x ~8" primary hull, polycarbonate
- 6" acrylic down-facing viewing dome
- 3d-printed internal lattice
- Aluminum bulkhead ring
- 75ft Cat6 tether
Software#
- Ubuntu 20.04
- ROS2 framework
NURC 2023#
The performance at NURC 2023: Unlocking Atlantis was sub-optimal, but considering the MF arrived with no Power Core and no software, it was pleasantly surprising to have the vehicle moving at all on Saturday evening.
Several flaws were discovered over the 2-day event:
- The horizontal thrusters are too low for the center of drag, causing the vehicle to list upward while driving forward or backward,
- The vertical thrusters need to be trimmed, as surge motions also caused significant (and entertaining) coupled pitch and roll motions,
- Camera latency was egregious, on the order of 400-500ms (this has since been resolved),
- Camera mount required black inner lining to prevent blowout from the LED ring,
- Without active stabilization, more separation between CoM and CoB is needed,
- A broken seal on the depth gauge led to several panic-laden lost hours, but once cleared, the vehicle proved water-tight to at least 10 feet,
- A corrupted file system occasionally led periodically to boot-loops.
MEDIA#
Competition details can be found here.
You can watch the mission run here.